V-Core 4.0 - Hybrid
calibration
| set-up
- Install the flex plate.
- Run the following command in your console:
BEACON_RATOS_CALIBRATEERROR. "Probe sample exceed sample_tolerance"
If you encounter the message ‘probe sample exceeded sample_tolerance’ during Beacon calibration, don’t worry! Here are a few potential fixes for the issue:
- Loose noozle. Hot tighten the noozle as mentioned here.
- Ensure the toolhead has no excessive play. Try gently rotating it to check for any loose screws on the rail or carriage plate.
- Verify that the beacon is securely attached.
- Verify that the Z arm screws are secure and sturdy.
- Ensure that the Z stepper motor couplers are tightly secured.
This issue usually comes down to assembly problems. If none of the above suggestions resolved it, triple-check your machine, something might be loose.
Hybrid Belts
- Follow the dedicated guide explaining how to route the Y-belts.
02. Belt Tension and Gantry Alignment
- You verified during assembly that the gantry moved freely without the belts, and is aligned correctly.
- All belts have been fitted with enough tension to allow the motion system to work.
- The previous chapter "Sanity Check" has been completed successfully.
- Home all axes on the machine by clicking "HOME ALL"
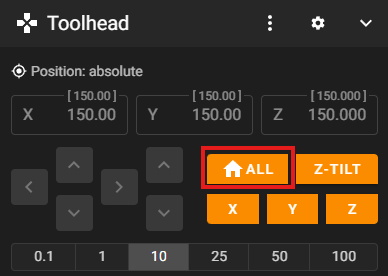
- Now let’s position the gantry to start the process. Insert 272mm in the Y axis position
- Put your machine into IDEX COPY mode - IDEX Machines only

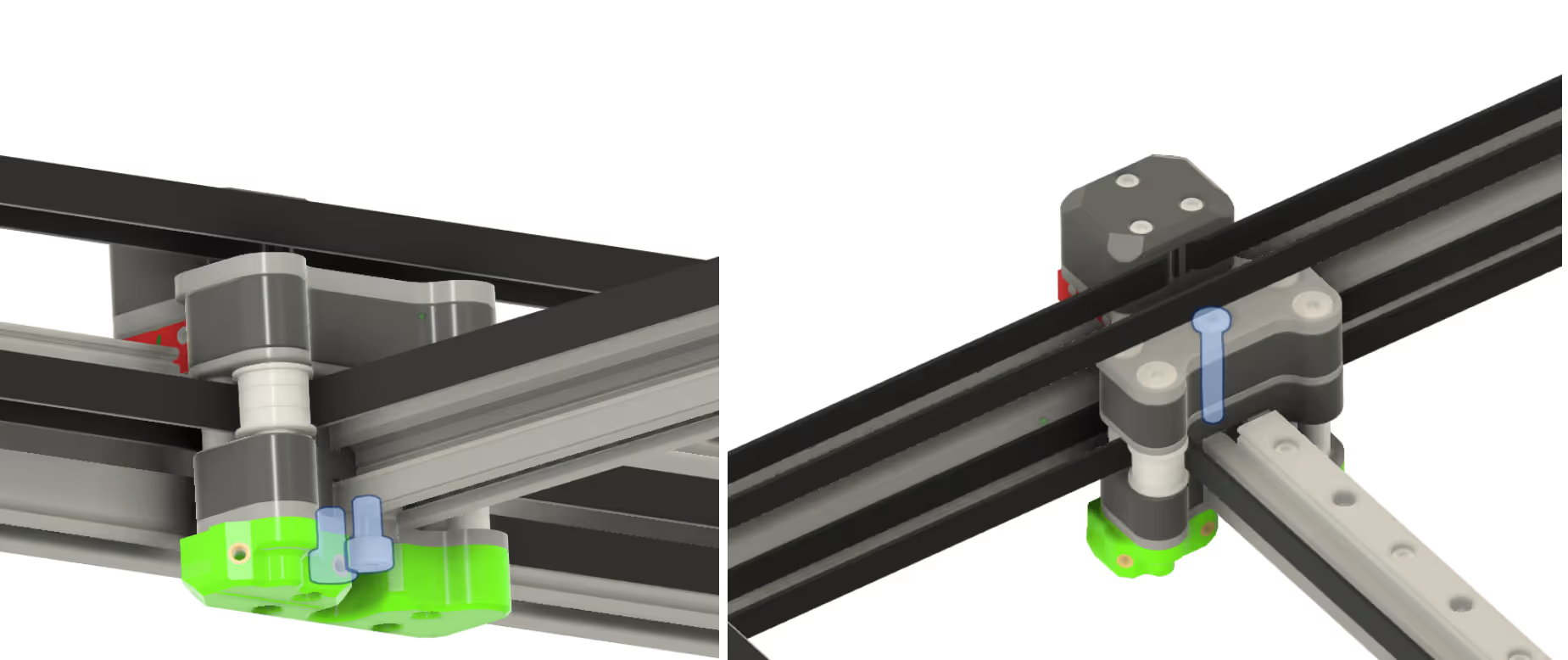
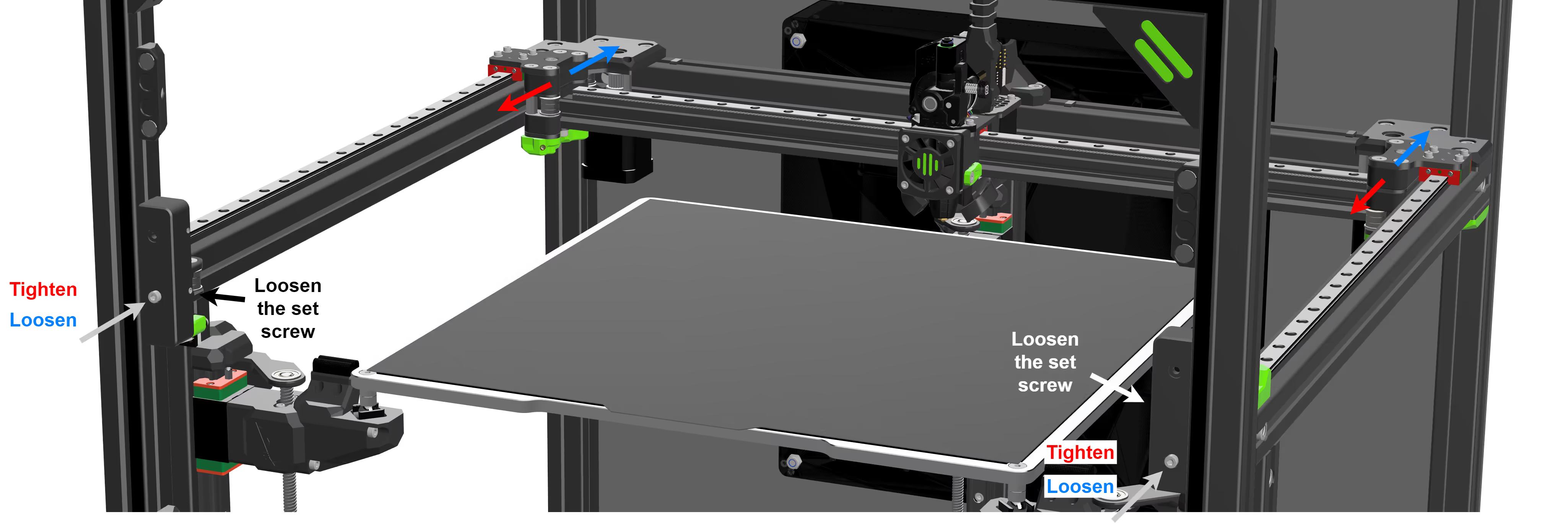
- Slightly loosen the screws highlighted in the image (the ones securing the 2020 aluminum extrusion)
- Run the following command in your console:
M18 - Please download and install the Smart Belt Drive app from the App Store or Google Play Store.Note!We suggest this app but you are free to choose another one. The most important thing is that the frequencies that you are measuring are right. So be aware that this is crucial and it will impact your machine performance.
- Open the “Frequency Measure”
- Click the red button to start recording the frequency.
- It's time to pluck your belt!Note - How to pluck:- Use your fingertip, fingernail, or a thin pick to pull the belt slightly outward and release it quickly.
- Do it perpendicular to the belt (like plucking a guitar string).
- Always pluck in the same spot, right in the middle of the belt section where you’re performing the pluck.
- Make the pluck quick and consistent, don’t press or dampen the belt vibration afterwards
- Repeat 3–5 times in the same spot with the same strength.
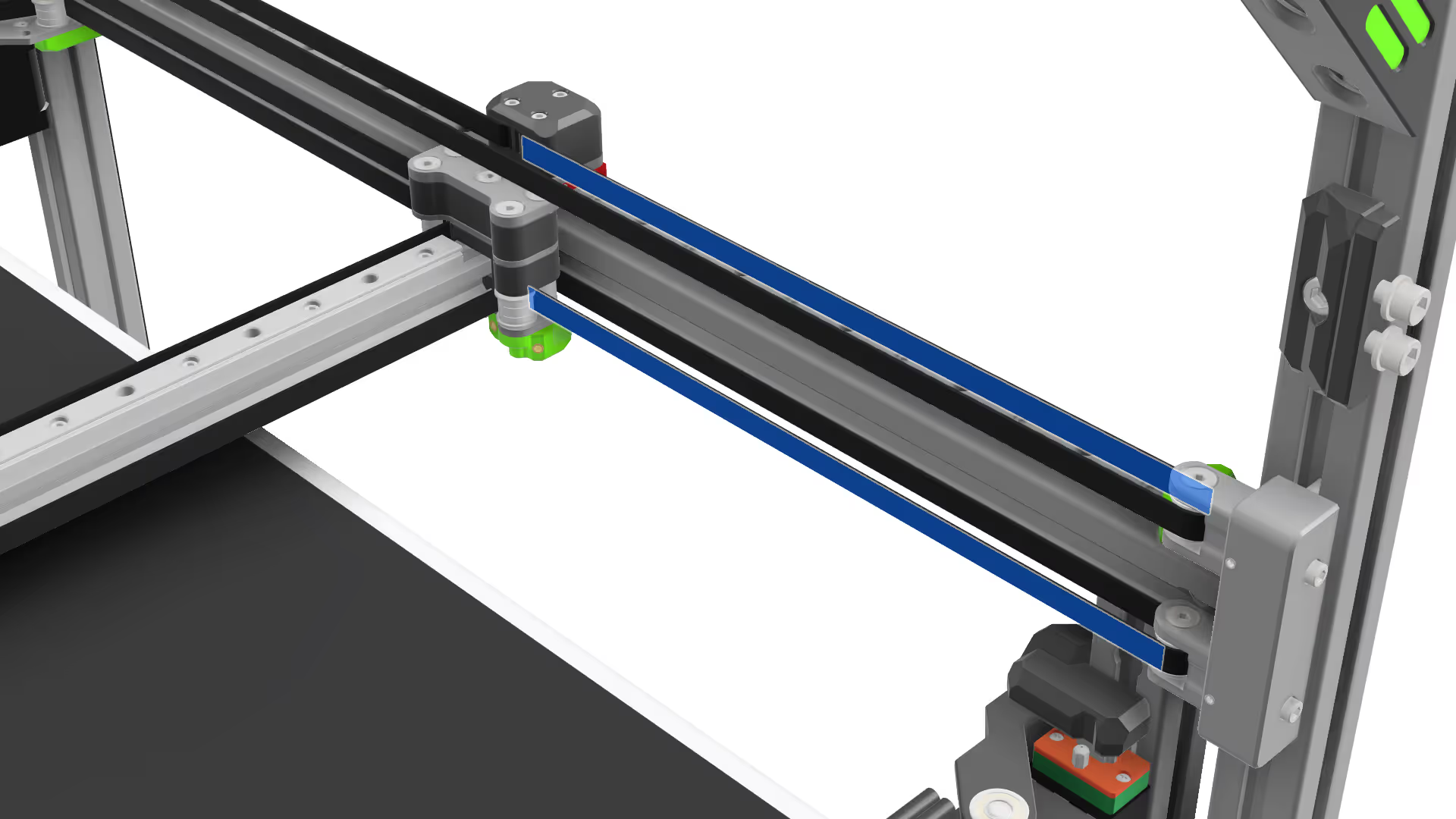
- Notice the belts that are highlighted — these are the ones you’ll need to pluck, on both sides of the machine.
 Note - How to adjust tension::
Note - How to adjust tension::- Whenever frequency values are higher than desired, turn the tensioner block screw anti-clockwise (as a rule of thumb, a quarter turn corresponds to roughly a 10 Hz adjustment).
If the values are below the desired level, turn the screw clockwise.
Remember to loosen the set screw on the side of the block.
Important Note:
Your Left and Right Belt needs to have the same frequency values.
If you are getting frequency readings around ~30 Hz or ~130 Hz, you need to repeat the plucks, those frequencies correspond to an incorrect harmonic. Make sure you obtain at least three consistent frequency readings. - Tension the Hybrid belts, aiming for 84 Hz (+-1Hz)
- Tension the CoreXY belts, aiming for 87 Hz (+- 1Hz)
- Because adjusting the CoreXY tension can affect the Hybrid tension, we need to check the Hybrid tension again. Repeat steps 10 and 11 until all the belts are plucking with the correct frequency.
- Now that you’ve tensioned the belts and reached the desired frequency, we’ll proceed with the fine adjustment.
- Move the toolhead(s) to the center of the machine (they must be clear of the motor cages and any PTFE tube guides). - Gently slide the gantry fully to the back until the joiners contact the stepper motor cages.
- Press both joiners against the stepper motor cages. You will probably feel that one side is making firm contact, and the other has some play. We need to adjust the balance of corexy belt tension until both sides are making firm contact at the same time with no play.
If both sides are making firm contact, no further adjustment is required.
Otherwise, identify the side that does not make firm contact. - Loosen only the lower set screws on both the left and right tensioner blocks.Note - Explanation Block:
We will need to slightly decrease the tension on the identified side by turning the tension screw anti-clockwise, and slightly increase the tension on the other side by turning the screw clockwise.
To avoid causing excessive gantry twist, make any adjustments symmetrically on both sides but in opposite directions.
For example, if you tighten the right tensioner, slightly loosen the left tensioner. Do not attempt to straighten the gantry using only one side. - Make small adjustments until both joiners make firm contact with the stepper motor cages at the same time.
- Tighten the gantry screws that were slightly loosened in step 5.
03. Belt tension - Advanced users only
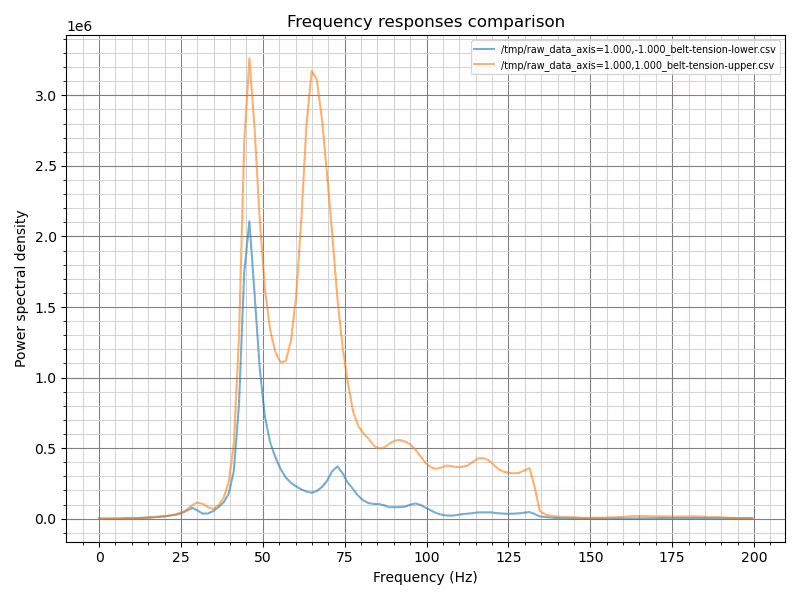
Belt tension graphs are meant to help diagnose your machine assembly rather than serve as a tuning tool. It’s easy to over-focus on them, but they should be seen as a guide for spotting issues rather than a perfect benchmark. Belt tension analysis is a nuanced and evolving subject; for deeper exploration, check out the excellent work by the Klippain Shaketune team.
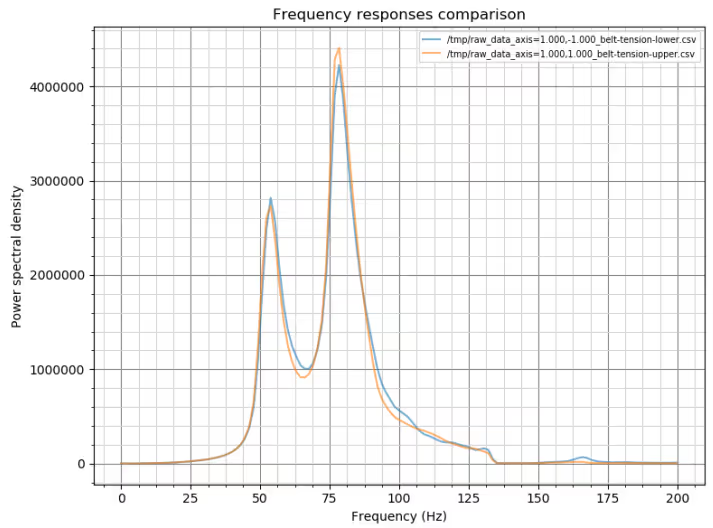
- The two peaks (blue and orange) must be aligned on the same frequency, if they are not vertically aligned, then you need to tension or loosen the belts, and your gantry is most likely twisted. Refer to this guide to help you troubleshoot.
- Toolhead vibrations typically appear in the 100–150 Hz range and can result from loose screws, damaged printed parts, unsecured wires, or insufficient cable management (e.g., missing zip ties).
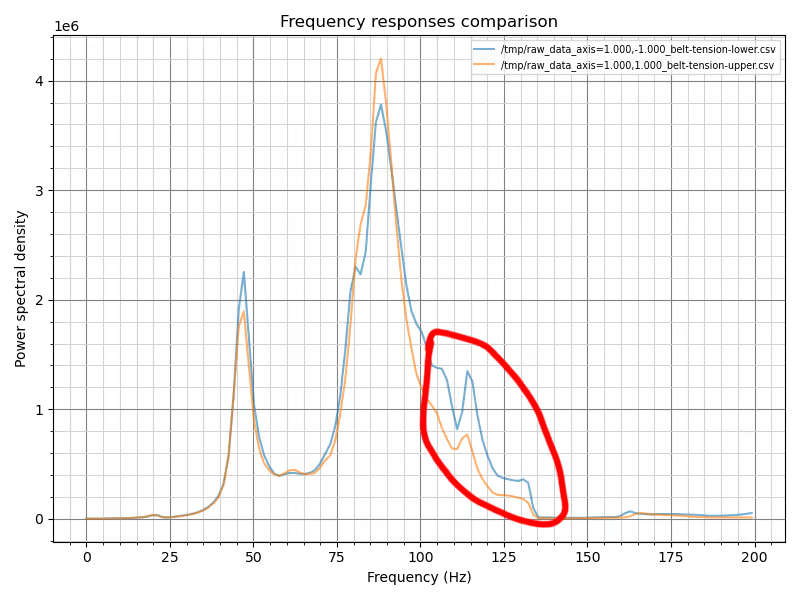
- There is an issue with the belt path: If your graph lacks one or two peaks. It likely means a belt is rubbing against something along its path, such as an idler, motor pulley, or the frame.3.1. In the example below, only one belt path is affected.
 3.2. In the example below, both belt paths are affected.
3.2. In the example below, both belt paths are affected.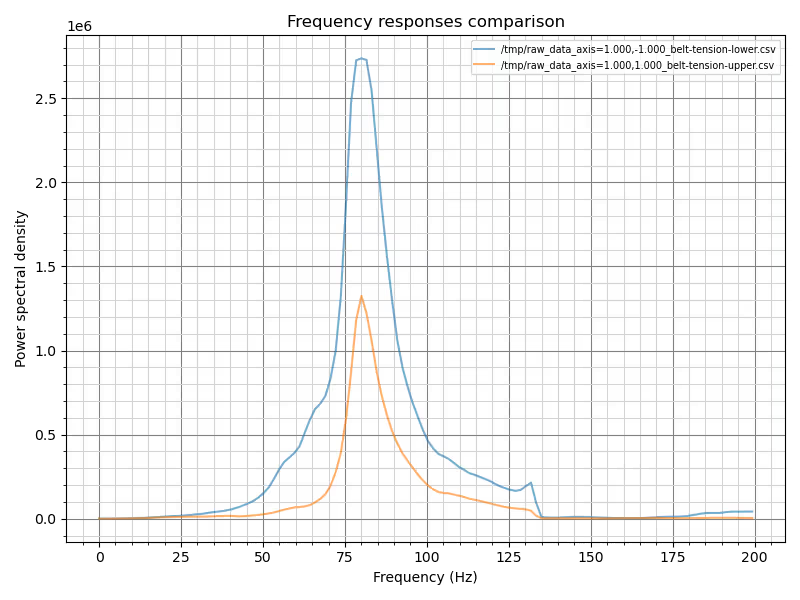
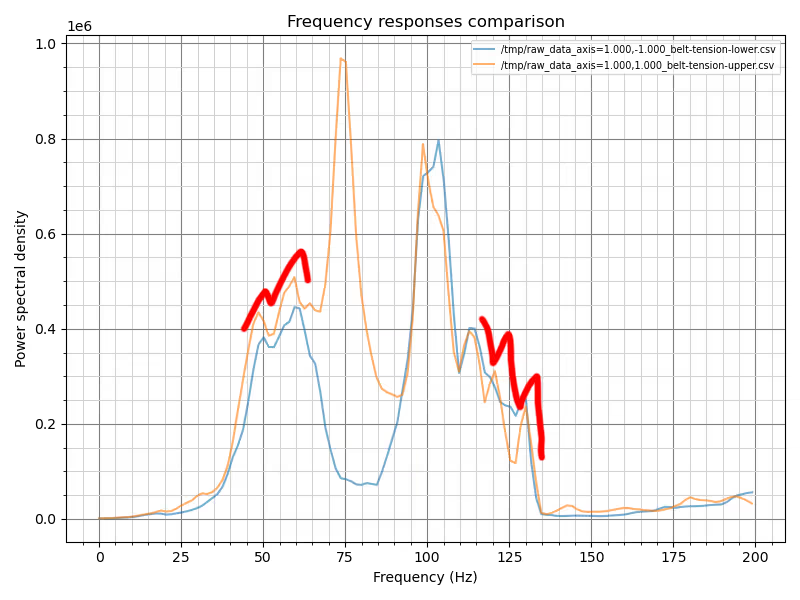
- Lastly, it’s important to distinguish between vibrations and swinging.4.1. Vibrations appear as zig-zag patterns on the graph and are usually caused by loose screws on the toolhead or gantry. Loose idler stacks or missing shims can produce the same effect. Carefully inspect the assembly to identify and correct the source.
 4.2. Swinging appears as smooth curves on the graph and is often caused by the printer resting on an unstable table or uneven floor. Ensure your machine is on a solid, level surface to prevent it from shaking.
4.2. Swinging appears as smooth curves on the graph and is often caused by the printer resting on an unstable table or uneven floor. Ensure your machine is on a solid, level surface to prevent it from shaking.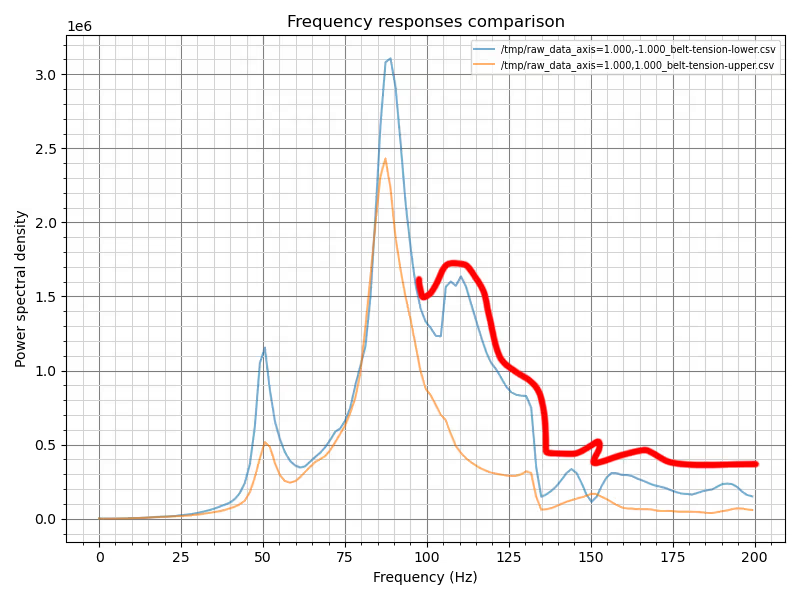
04. Input ShapER
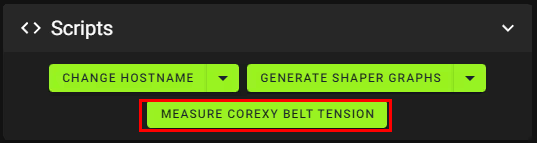
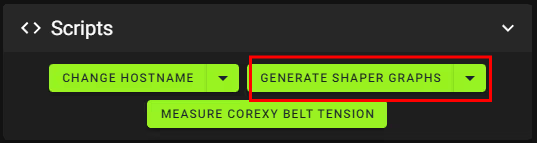
- Open the SCRIPTS window and click GENERATE SHAPER GRAPHS.
- After completion, open the machine tab (1) and navigate to the input_shaper (2) folder.
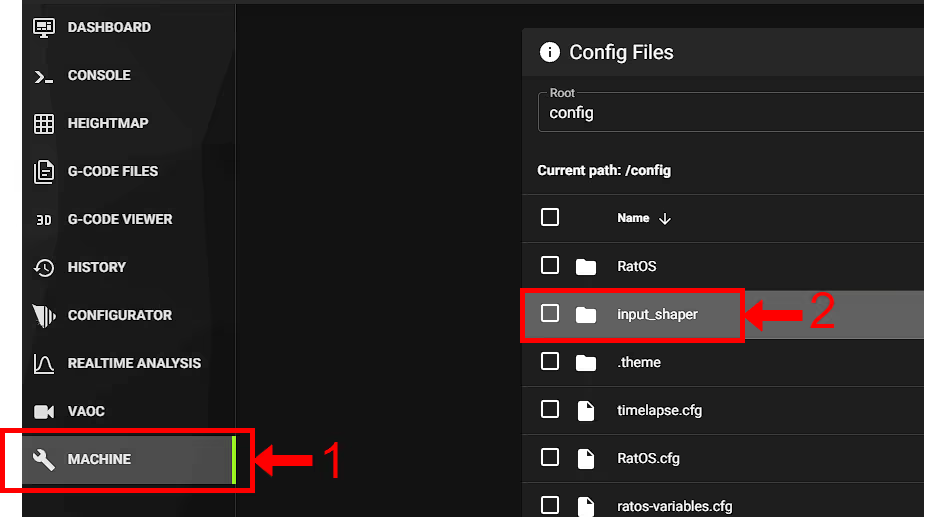 Note!You will find two files. Each file name indicates the axis (X or Y), and the timestamp.
Note!You will find two files. Each file name indicates the axis (X or Y), and the timestamp.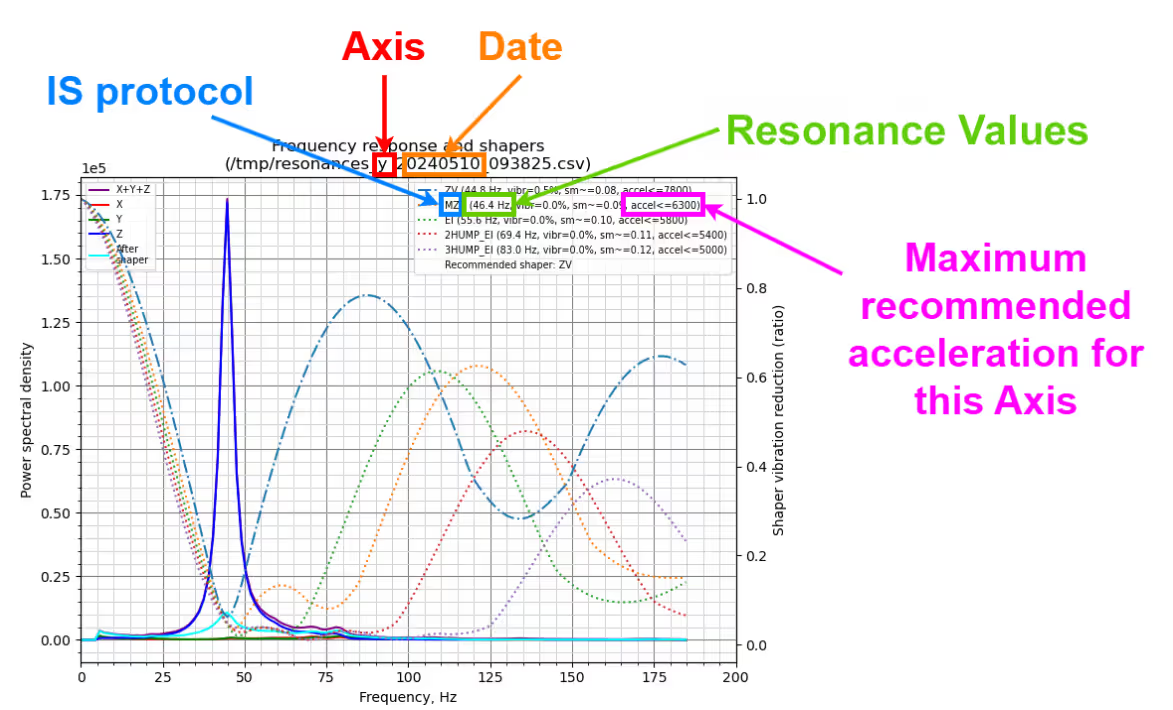
- Open every graph and regist the MZV resonance frequencies. These values will be used in the next step when editing the printer.cfg file.
- Open the machine (1) tab and then open the printer.cfg (2) file.
 Note!Example: MZV (46.4 Hz, vibr:0.0%, sm~=0.09, accel<=6300)
Note!Example: MZV (46.4 Hz, vibr:0.0%, sm~=0.09, accel<=6300)
Notice that this protocol recommends a maximum acceleration of 6300 mm/s². You must compare this value with the one indicated on the X-axis graph and use the lower of the two. That value should be set as your external perimeter acceleration in the slicer profile to minimize visible ghosting. The default external perimeter speed and acceleration in the V-Core 4.0 profiles are somewhat conservative, and you may increase them based on your Input Shaper results to achieve the best balance between print quality and performance. - Copy the code below. Open 'printer.cfg', then scroll down until you see the heading for 'User Overrides'. Paste the code under the 'User Comments' heading. Then replace 'Your_X_Frequency' and 'Your_Y_Frequency' with the corresponding MZV resonance frequencies from step 3
[input_shaper] shaper_freq_x: Your_X_Frequency shaper_type_x: mzv shaper_freq_y: Your_Y_Frequency shaper_type_y: mzv - Click "SAVE & RESTART" at the top right of the printer.cfg page.
05. Resonance analysis
Discover how this diagnostic tool works and how you can apply it
If the incorrect toolhead moved, it means the X stepper and DC stepper connectors on the Octopus board are swapped. Disconnect the machine from power and swap the connectors. Check the wiring diagram here.
07. Skew Calibration
- Start by downloading the Skew_correction_tool.stl. Then open it inside your slicer. If this is your first time following this guide, please follow the Slicer installation first, then get back to this step.
Caution.
When slicing the model, make sure the A corner is pointing to the origin of the print area.
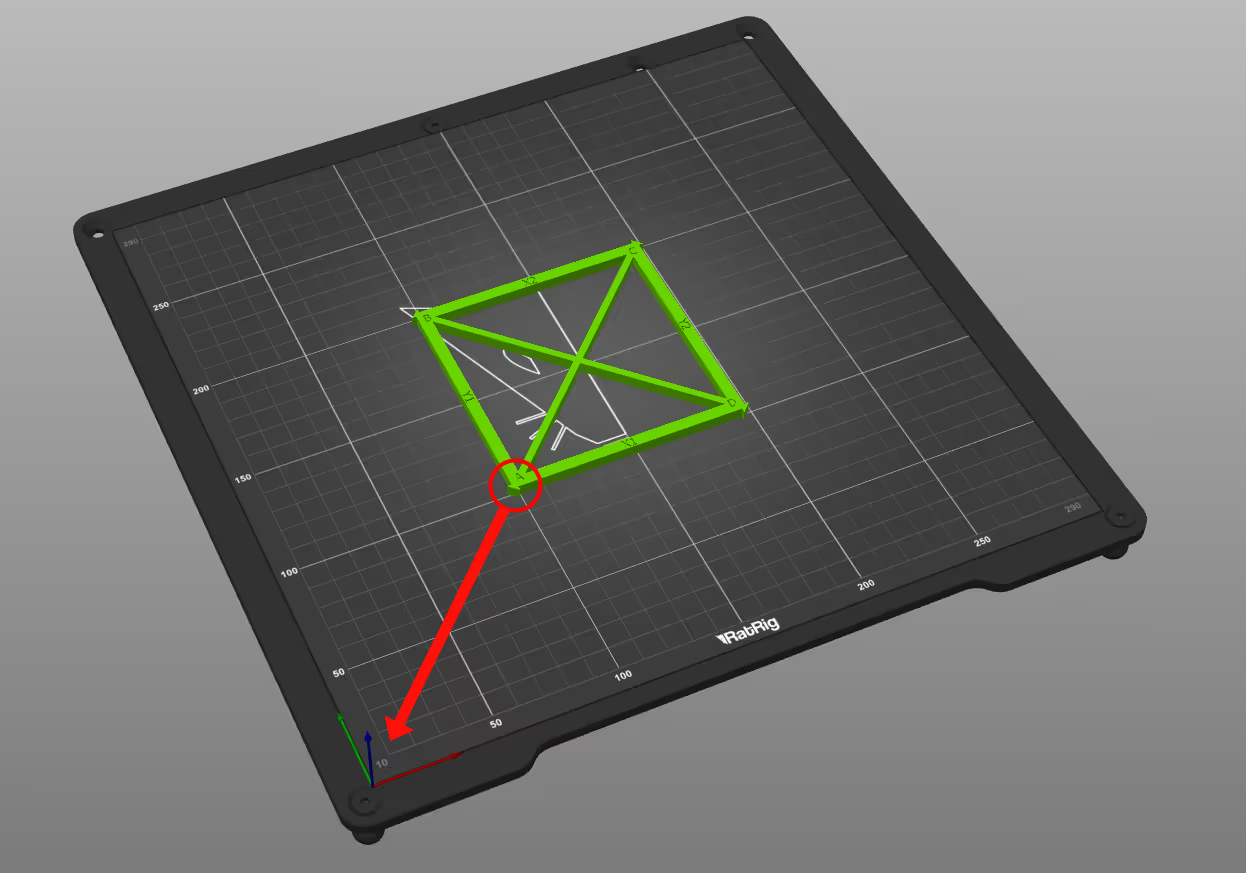
- Guarantee that no skew correction is running on your machine, check that variable_skew_profile is commented out in the macro configuration section. or type the command below in the terminal. For more information, click here.
SET_SKEW CLEAR=1The [skew_correcton] module requires 3 measurements; the length from Corner A to Corner C, the length from Corner B to Corner D, and the length from Corner A to Corner D.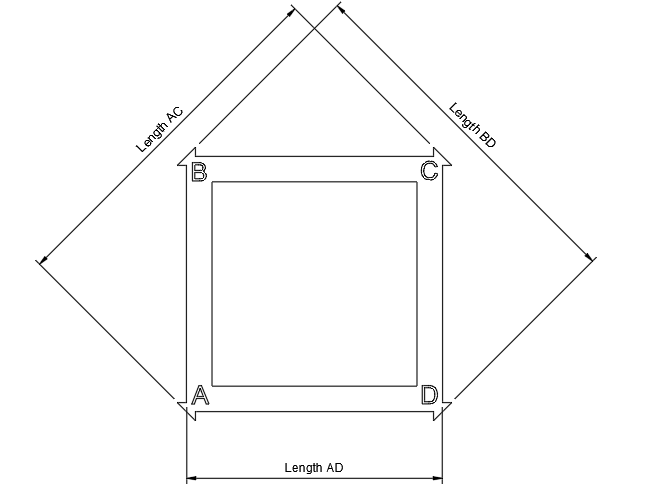 Let's take the following measurements as an example:
Let's take the following measurements as an example:
AC= 141.15mm
BD= 140.9mm
AD= 99.65mm - Go into the printer.cfg and add the following lines:
[gcode_macro RatOS] variable_skew_profile: "my_skew" - Click “SAVE AND RESTART” at the top right of the printer.cfg window, then run the following command in your console:NOTE: Replace the "AC, BD, AD" text with your values.
SET_SKEW XY=AC,BD,ADNote!With the previous example, we have:
SET_SKEW XY=141.15,140.9,99.65 - Run the following command in your console
SKEW_PROFILE SAVE="my_skew" - Run the following command in your console
SAVE_CONFIG - Re-print the test, make sure AC=BD. If not, double check all measurements and start this calibration again.